Видео:Электромеханические переходные процессы, правило площадейСкачать
Динамическая устойчивость

Если статическая устойчивость характеризует установившийся режим системы, то при анализе динамической устойчивости выявляется способность системы сохранять синхронный режим работы при больших его возмущениях. Большие возмущения возникают Ври различных коротких замыканиях, отключении линий электропередачи, генераторов, трансформаторов и пр. К большим возмущениям относятся также изменения мощности крупной нагрузки потеря возбуждения какого-либо генератора, включение крупных двигателей. Одним из следствий возникшего возмущения является отклонение скоростей вращения роторов генераторов от синхронной (качания роторов генераторов системы).
Если после какого-либо возмущения взаимные углы роторов примут определенные значения (их колебания затухнут около каких-либо новых значений), то считается, что динамическая устойчивость сохраняется. Если хотя бы у одного генератора ротор начинает проворачиваться относительно поля статора, то это признак нарушения динамической устойчивости. В общем случае о динамической устойчивости системы можно судить по зависимостям  , полученным в результате совместного решения уравнений движения роторов генераторов. Но существует более простой и наглядный метод, основанный на энергетическом подходе к анализу динамической устойчивости, который называется графическим методом или методом площадей [15, 24].
, полученным в результате совместного решения уравнений движения роторов генераторов. Но существует более простой и наглядный метод, основанный на энергетическом подходе к анализу динамической устойчивости, который называется графическим методом или методом площадей [15, 24].
10.1 АНАЛИЗ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ ПРОСТЕЙШЕЙ СИСТЕМЫ ГРАФИЧЕСКИМ МЕТОДОМ
Рассмотрим простейший случай, когда электростанция G работает через двухцепную линию на шины бесконечной мощности (рис. 10.1, а). Условие постоянства напряжения на шинах системы (U = const) исключает качания генераторов приемной системы и значительно упрощает анализ динамической устойчивости. Схема замещения системы показана на рис. 10.1, б. Генератор входит в схему замещения сопротивлением x‘d и ЭДС E’q. Мощность, выдаваемая генератором в систему, равна мощности турбины и обозначена Р0, угол генератора — d0. Характеристика мощности, соответствующая нормальному (доаварийному) режиму, может быть получена из выражения (9.10) без учета второй гармоники, что вполне допустимо в практических расчетах. Принимая Еq’ = Е’, получим выражение характеристики мощности в следующем виде:

 где,
где,
 Зависимость Р = f(d) для нормального режима приведена на рис. 10.1, г (кривая 7).
Зависимость Р = f(d) для нормального режима приведена на рис. 10.1, г (кривая 7).
Рис. 10.1. К анализу динамической устойчивости простейшей системы: а — принципиальная схема; б — схема замещения в нормальном режиме; в — схема замещения в послеаварийном режиме; г — графическая иллюстрация динамического перехода: характеристики нормального и аварийного режимов (кривые /, 2 соответственно)
Предположим, что линия L2 внезапно отключается. Рассмотрим работу генератора после ее отключения. Схема замещения системы после отключения линии показана на рис. 10.1, в. Суммарное сопротивление послеаварийного режима x‘dS (n a) = x‘d + xTl + xLl + xT2 увеличится по сравнению с x’dS (суммарное сопротивление нормального режима). Это вызовет уменьшение максимума характеристики мощности послеаварийного режима (кривая 2, рис. 10.1, г). После внезапного отключения линии происходит переход с характеристики мощности 1 на характеристику 2. Из-за инерции ротора угол d не может измениться мгновенно, поэтому рабочая точка перемещается из точки а в точку b.
На валу, соединяющем турбину и генератор, возникает избыточный момент, определяемый разностью мощности турбины, которая не изменилась после отключения линии, и новой мощности генератора (DР = Р0 — Р(0))- Под влиянием этой разности ротор машины начинает ускоряться, двигаясь в сторону больших углов d. Это движение накладывается на вращение ротора с синхронной скоростью, и результирующая скорость вращения ротора будет w=w0+ Dw, где w0 — синхронная скорость вращения; Dw — относительная скорость. В результате ускорения ротора рабочая точка начинает движение по характеристике 2. Мощность генератора возрастает, а избыточный (ускоряющий) момент (пропорциональный разности DР = ро — Р(0)) — убывает. Относительная скорость Dw возрастает до точки с. В точке с избыточный момент становится равным нулю, а скорость Dw — максимальной. Движение ротора со скоростью со не прекращается в точке с, ротор по инерции проходит эту точку и продолжает движение. Но избыточный момент при этом меняет знак и начинает тормозить ротор. Относительная скорость вращения начинает уменьшаться и в точке d становится равной нулю. Угол d в этой точке достигает своего максимального значения. Но и в точке d относительное движение ротора не прекращается, так как на валу агрегата действует тормозной избыточный момент, поэтому ротор начинает движение в сторону точки с, относительная скорость при этом становится отрицательной. Точку с ротор проходит по инерции, около точки b угол становится минимальным, и начинается новый цикл относительного движения. Колебания угла d(t) показаны на рис. 10.1, г. Затухание колебаний объясняется потерями энергии при относительном движении ротора.
Избыточный момент связан с избытком мощности выражением

где w — результирующая скорость вращения ротора.
Изменение скорости Dw при качаниях пренебрежимо мало по сравнению со скоростью w0, поэтому с достаточной для практика точностью можно принять w = w0, и тогда получаем (выражая DМ, DР и w0 в относительных единицах) DМ* = DР/w0 = DР*, поскольку w0 = 1. Рассматривая только относительное движение ротора и работу, совершаемую в этом движении, можно предположить, что при перемещении ротора на бесконечно малый угол db избыточный момент выполняет элементарную работу DМdd. При отсутствии потерь вся работа идет на изменение кинетической энергии ротора в его относительном движении.
В тот период движения, когда избыточный момент ускоряет вращение ротора, кинетическая энергия, запасенная ротором в период его ускорения, будет определяться по формуле

где fabc — заштрихованная площадь abc на рис. 10.1, г. Изменение кинетической энергии в период торможения вычисляется как

Площади fabc и fcde пропорциональные кинетической энергии ускорения и торможения, называются площадями ускорения и торможения.
В период торможения кинетическая энергия ротора переходит в потенциальную энергию, которая возрастает с уменьшением скорости Асо. В точке d кинетическая энергия равна нулю, и для определения максимального угла отклонения ротора 5W достаточно выполнить условие
Отсюда следует, что при максимальном угле отклонения площадь ускорения должна быть равна площади торможения. Максимально возможная площадь торможения определяется углом dкр. Если максимальный угол превысит значение dкр, то на валу турбина — генератор возникнет ускоряющий избыточный момент (Р0 > PG) и генератор выпадет из синхронизма. На рис. 10.1, г площадь cdm —максимально возможная площадь ускорения. Определив ее, можно оценить запас динамической устойчивости. Коэффициент запаса вычисляется по выражению

10.2. ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ ПРИ КЗ НА ЛИНИИ
Наиболее распространенным видом возмущений, приводящим к необходимости анализа динамической устойчивости, является короткое замыкание. Рассмотрим общий случай несимметричногоКЗ в начале линии L2 (точка К1 на рис. 10.2, а). Схема замещения
системы для режима короткого замыкания показана на рис. 10.2, б.
В точке К1 включено шунтирующее сопротивление КЗ хD, со-1 стоящее из суммарных сопротивлений хS2 и xS0 обратной и нулевой последовательностей, определенное по тем же правилам, что и для расчета токов несимметричного КЗ (см. разд. 5) [25]. После возникновения КЗ мощность, передаваемая от генератора в систему, изменится, как и суммарное сопротивление хS1 , связывающее

Рис. 10.2. Короткое замыкание в простейшей системе: а — принципиальная схема; б — схема замещения для режима КЗ в точке К1
генератор с системой. Это сопротивление может быть найдено из схемы замещения (рис. 10.2, б) следующим образом:
 (10,2)
(10,2)
Сопротивления XS2 и XS3 находятся по аналогичным выражениям преобразования звезды в треугольник, но они не влияют на значение мощности генератора в аварийном режиме и могут не учитываться. Подставив сопротивление XS1 в выражение характеристики мощности (10.1), получим синусоиду, лежащую ниже характеристик нормального и послеаварийного режимов. Это объясняется увеличением сопротивления XS1
В момент КЗ из-за изменения параметров схемы происходит переход с одной характеристики мощности на другую (рис. 10.3). Так как ротор обладает определенной инерцией, то угол d мгновенно измениться не может и отдаваемая генератором мощность уменьшается до значения Р(0. Мощность турбины при этом не изменяется ввиду запаздывания ее регуляторов. На валу турбина — генератор возникает некоторый избыточный момент, определяемый избытком мощности (DР = ро — Р(0) Под влиянием этого момента ротор генератора начинает ускоряться, угол d увеличивается. Качественно процесс протекает так же, как в предыдущем случаевнезапного отключения линии. Поскольку линия L2, как и I любой другой элемент системы электроснабжения, имеет защиту, через определенное время она отключится выключателями В1 и В2.  Это время рассчитывается как
Это время рассчитывается как
t откл = tЗ + t выкл
где tЗ — собственно время срабатывания защиты; t выкл — время срабатывания выключателей В1 и В2 (предполагается, что выключатели срабатывают одновременно).
Времени /откл соответствует
угол отключения КЗ dОТКЛ. Отключение КЗ вызывает переход с характеристики мощности аварийного режима 2 на характеристику послеаварийного режима 3. При этом избыточный момент меняет знак, превращаясь из ускоряющего в
тормозящий. Ротор, тормозясь, продолжает движение в сторону увеличения угла из-за накопленной в процессе ускорения кинетической энергии. Это движение будет продолжаться до тех пор, пока площадь торможения fdefg не станет равной площади ускорения fabcd. В точке f скорость ротора становится синхронной. Но движение ротора не прекращается, так как на него действует тормозной избыточный момент, определяемый избытком мощности DРторм = Pf— ро — Ротор, ускоряясь, начинает движение в обратную сторону. Его скорость максимальна в точке п. После точки п относительная скорость начинает уменьшаться и становится равной нулю в точке Z. Эта точка определяется из равенства площадок fnefgt \fxnz. Из-за потерь колебания ротора будут затухать около нового положения равновесия послеаварийного режима — точки п.
Пример 10.1. В электропередаче, показанной на рисунке, в точке К происходит внезапное двухфазное КЗ на землю. В момент времени t1, оно переходит в трехфазное, а затем в момент времени t2 поврежденная линия отключается.
Параметры исходного режима и параметры электропередачи при Sd = 220 MBA и базисном напряжении на ступени 220 кВ Ud = 209 кВ следующие:

Требуется определить, сохранится ли динамическая устойчивость, если моменту времени t соответствует угол 50°, t2 — угол 70°.
Решение. Составим схему замещения для нормального режима и определим ЭДС генератора за переходным реактивным сопротивлением.
Суммарное сопротивление системы вычислим так:
 .
.
Величину и фазу переходной ЭДС за переходным сопротивлением найдем по формуле

Подставив в формулы числовые значения, получим

 |

Схемы замещения электропередачи прямой, обратной и нулевой последовательностей приведены ниже.

Амплитуду характеристики мощности для нормального режима Рm1 найдем из выражения

Амплитуду характеристики мощности аварийного режима определим сле-I дующим образом:

где xdS2 — взаимное сопротивление схемы в аварийном режиме, которое вычисляется так:




Подставляя в формулы числовые значения, получим





Послеаварийный режим определяется отключением одной цепи линий электропередачи, после чего сопротивление xl удвоится и суммарное сопротивление электропередачи составит
Х’dS3= 0.95+ 0.138+ 0.488+ 0.122 = 1.04.
Амплитуда характеристики мощности послеаварийного режима

Характеристики мощности приведены на рисунке. Построим площади ускорения и торможения. Найдем, что при двухфазном коротком замыкании мощность, отдаваемая генератору, уменьшается до величины, соответствующей точке 2 на характеристике III. Под действием избыточного момента DМо = DPо ротор генератора ускоряется.
В момент времени t1 (соответствует углу d,) при трехфазном коротком замыкании отдаваемая генератором мощность падает до нуля. Под действием полного избыточного момента, равного моменту турбины, ротор продолжает ускоряться.

В момент времени t2 (соответствует углу d’2) после отключения поврежденной линии мощность, отдаваемая генератором, повышается до значения, определяемого точкой 7 на характеристике послеаварийного режима П. Здесь электрическая мощность, отдаваемая генератором, больше мощности, развиваемой турбиной, генератор тормозится, но угол d продолжает увеличиваться в соответствии с накопленной ротором энергией до точки 8 (угол dmах), где кинетическая энергия, накопленная ротором в процессе ускорения, полностью израсходуется при его торможении. Этому соответствует равенство площадей ускорения и торможения (FУCK = FTOРM). Затем угол d начнет уменьшаться. После нескольких циклов качаний ротора установится новый режим, определяемый точкой 10 на характеристике послеаварийного режима II.
Отношение возможной площади торможения к площади ускорения -1 дает коэффициент запаса устойчивости.
10.3. ПРЕДЕЛЬНЫЙ УГОЛ ОТКЛЮЧЕНИЯ КЗ
Из рис. 10.3 можно найти предельное значение угла отключения КЗ, при котором устойчивая работа системы сохраняется. Оно определяется равенством площади ускорения fabcd и возможной площади торможения fdefm. Приравнивая к нулю сумму этих площадей, получаем аналитическое выражение для предельного угла отключения КЗ:

Раскрывая определенные интегралы, запишем
Ро(dткл. пр — d0) + Pmax2(COSdOTKJ1пр — COSd0) + Ро(dкр — dоткл. пр) + Pmах(COSdкр — COSdOTKJ1пр) = 0.

(10.3)

(все углы выражены в радианах).
Однако для практических целей знания угла dоткл пр недостаточно. При выборе выключателей и расчете релейной защиты необходимо знать не угол, а период времени, в течение которого ротор успевает достигнуть этого угла, т. е. предельно допустимое время отключения КЗ. Это время может быть определено решением уравнения движения ротора генератора известными методами решения дифференциальных уравнений (например, методом Рунге —
Кутта 4-го порядка или методами последовательных интервалов).
10.4. АНАЛИЗ ТРЕХФАЗНОГО КЗ ГРАФИЧЕСКИМ МЕТОДОМ
При трехфазном КЗ в точке К1 взаимное сопротивление схемы становится бесконечно большим, так как сопротивление шунта КЗ
 . При этом характеристика мощности аварийного режима совпадает с осью абсцисс (рис. 10.4). Ротор генератора начинает свое относительное движение под действием избыточного момента, равного механическому моменту турбины. Дифференциальное уравнение движения ротора при этом принимает вид
. При этом характеристика мощности аварийного режима совпадает с осью абсцисс (рис. 10.4). Ротор генератора начинает свое относительное движение под действием избыточного момента, равного механическому моменту турбины. Дифференциальное уравнение движения ротора при этом принимает вид
 (10.4) Это уравнение линейно, и нетрудно получить его решение. Перепишем (10.4) в следующем виде:
(10.4) Это уравнение линейно, и нетрудно получить его решение. Перепишем (10.4) в следующем виде:


откуда, взяв интеграл от левой и правой частей, получим
 (10.5)
(10.5)
При t= 0 относительная скорость ротора w = 0 и, следовательно, С1 = 0. Проинтегрировав еще раз (10.5), имеем
Рис. 10.4. Трехфазное КЗ в начале линии

Постоянная интегрирования с2 определяется из условий d = d0, с2 = d0 при t = 0. Окончательно зависимость угла от времени будет иметь вид
 (10.6)
(10.6)
Возрастание угла происходит по квадратической параболе, а время, отвечающее какому-либо значению угла d, находится из уравнения (10.6):
 (10.7)
(10.7)
Предельный угол отключения трехфазного КЗ может быть определен из выражения (10.3), упрощенного условием Рmax2 = 0:

Предельное время отключения при трехфазном КЗ определится из выражения (10.7):


Когда трехфазное КЗ происходит не в начале линии (а, например, в ее середине), то условия нахождения взаимного сопротивления изменяются. Оно уже имеет конечное значение и определяется из схемы, показанной на рис. 10.5. Преобразовав треугольник из сопротивлений линий хL1, xL2/2 в звезду х1, х2, х3, получим схему связи генератора с системой, подобную схеме для несимметричного КЗ, изображенную на рис. 10.2, б.
Гис. 10.5. Схема замещения
и ее преобразование при
трехфазном КЗ в середине линии
Динамический переход в этом случае аналогичен переходу при I несимметричном КЗ.
10.5. РЕШЕНИЕ УРАВНЕНИЯ ДВИЖЕНИЯ РОТОРА ГЕНЕРАТОРА. МЕТОД ПОСЛЕДОВАТЕЛЬНЫХ ИНТЕРВАЛОВ
Уравнение движения ротора нелинейно и не может быть решено в общем виде. Исключением является полный сброс мощности в аварийном режиме, т. е. Рав. max = 0, рассмотренный выше. Уравнеие (9.7) решается методами численного интегрирования [14]. Одним из них является метод последовательных интервалов, иллюстрирующий физическую картину протекания процесса. В соответствии с этим методом весь процесс качания ротора генератора разбивается на ряд интервалов времени Dt и для каждого из : них последовательно вычисляется приращение угла Dd. В момент КЗ отдаваемая генератором мощность падает и возникает некоторый избыток мощности DР(о). Для малого интервала Dt можно допустить, что избыток мощности в течение этого интервала остается неизменным. Интегрируя выражение (9.7), получаем в конце первого интервала


Относительная скорость ротора в момент КЗ равна нулю (с1 = 0), и поэтому относительная скорость ротора в конце первого интервала равна DV(1). При t = 0 угол d = dо, поэтому с2 = d0. Ускорение а0 может быть вычислено из (9.4): а(1) = DР(о) / Тj отсюда следует

Здесь угол и время представлены в радианах. В практических расчетах угол выражают в градусах, а время — в секундах:
 , (10.8)
, (10.8)
Используя (10.8) и (10.9) и учитывая, что Tj(с) = Тj(рад)/w0 , получаем

 (10.10)
(10.10)
Ускорение, создаваемое во втором интервале, пропорционально избытку мощности в конце первого интервала  . При вычислении приращения угла в течение второго интервала необходимо учесть то, что кроме действующего в этом интервале ускорения a(1) ротор уже имеет в начале интервала скорость V(1):
. При вычислении приращения угла в течение второго интервала необходимо учесть то, что кроме действующего в этом интервале ускорения a(1) ротор уже имеет в начале интервала скорость V(1):
 (10.11)
(10.11)
Значение скорости V1 — неточное, так как ускорение a(0) не является постоянным в течение первого интервала времени. Более точное значение скорости можно получить, если предположить, что на первом интервале действует среднее ускорение:
Тогда относительная скорость будет выражена формулой
V(1)=a(0)cpDf = .
.
Подставляя это уравнение в (10.11), получаем




или Dd(2) =Dd(i) + КD.Р(1).. Приращение угла на последующих ин-тервалах рассчитывается аналогично: Dd(n) =Dd(n — i) + КD.Р(n — 1).. Если в начале некоторого K-интервала происходит отключение КЗ, то избыток мощности внезапно изменяется от некоторой величины D.Р’(K — 1).. (рис. 10.6) до D.Р’’(K — 1)., что соответствует пере ходу с характеристики 1 на 2. Приращение угла на первом интервале после отключения КЗ определится как
Рис. 10.6. К определению избытком мощности при переходе от одного режима (характеристика /) к другому (характеристика 2)

Расчет методом последовательных интервалов ведется до тех пор, пока угол d не начнет уменьшаться либо не будет ясно, что угол неограниченно растет, т. е. устойчивость машины нарушается.
10.6. ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ СЛОЖНЫХ СИСТЕМ
Расчет динамической устойчивости сложных систем можно представить в виде следующего алгоритма:
1. Расчет нормального (предшествующего КЗ) режима электрической системы. Результатом расчета являются значения ЭДС электростанций (Е’j) и углы между ними.
2. Составление схем замещения обратной и нулевой последовательностей и определение их результирующих сопротивлений относительно точки КЗ и точки нулевого потенциала схемы. Вычисление аварийных шунтирующих сопротивлений, соответствующих рассматриваемым КЗ.
3. Расчет собственных и взаимных проводимостей для всех станций системы в аварийном и послеаварийном режимах.
4. Расчет угловых перемещений роторов машин с помощью метода последовательных интервалов. Определение значений отдаваемых машинами мощностей в начале первого интервала:

5. Определение избытков мощности в начале первого интервала:
где рш, pio и т. д. — мощность машин в момент, предшествующий КЗ.
 6. Вычисление угловых перемещений роторов генераторов в
6. Вычисление угловых перемещений роторов генераторов в
течение первого интервала Dt

Во втором и последующих интервалах выражения для угловых перемещений роторов будут несколько иными:
 ,
,

Здесь коэффициенты К рассчитываются в соответствии с уравнением (10.10).
7. Определение новых значений углов в конце первого — начале
второго интервала:


где d1(n-1), d2(n-1) значения углов в конце предшествующего интервала.
8. Нахождение новых значений взаимных углов расхождения
роторов:
 ,
,
 ,
,
Зная эти значения, можно перейти к расчету следующего интервала, т. е. вычислить мощность в начале этого интервала, а затем повторить расчет, начиная с п. 5.
В момент отключения повреждения все собственные и взаимные проводимости ветвей меняются. Угловые перемещения роторов в первом интервале времени после момента отключения подсчитываются для каждой машины по выражению (10.12). В последующих интервалах расчет ведется по алгоритму, приведенному выше.
Расчет динамической устойчивости сложных систем выполняется для определенного времени отключения КЗ и продолжается не только до момента отключения КЗ, а до тех пор, пока не будет ус-

Рис. 10.7. Изменение относительных углов генераторов системы
тановлен факт нарушения устойчивости или ее сохранения. Об этом судят по характеру изменения относительных углов. Если хотя бы один угол неограниченно растет (например, угол d12 на рис. 10.7), то система считается динамически неустойчивой. Если все взаимные углы имеют тенденцию к затуханию около каких-либо новых значений, то
система устойчива. Если структура рассчитываемой системы такова, что в ней есть какая-либо станция, мощность которой превосходит мощности остальных станций, то относительные углы отсчитываются относительно этой станции.
Если по характеру изменения относительных углов установлено нарушение устойчивости при принятом в начале расчета времени отключения КЗ, то для определения предельного времени КЗ следует повторить расчет, уменьшая время отключения КЗ до тех пор, пока очередное его значение не даст устойчивого решения.
10.7. ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ ДВИГАТЕЛЕЙ НАГРУЗКИ
Двигатели нагрузки при больших возмущениях оказывают влияние не только на режим ее работы, но и на функционирование системы, питающей нагрузку. Можно выделить два типа возмущений, характерных для систем электроснабжения:
1. Снижение напряжения на зажимах двигателя, вызванное:
— коротким замыканием в распределительной сети;
— кратковременным прекращением питания двигателей;
Предположим, что напряжение при этом изменяется скачкообразно, как это показано на
рис. 10.8, а. Очевидно, что при отключении двигателя от сети U1 = 0.

Рис. 10.8. Изменение напряжения на зажимах двигателя (а) и механического момента (б)
2. Изменение механического момента на валу двигателя, связанное с изменением режима работы приводимого механизма.
Предположим также, что это изменение происходит скачком в моменты времени t0 и t1 так, как это показано на рис. 10.8, б. В обоих случаях в момент времени t1 возмущение прекращается, а механический момент или напряжение восстанавливают свои прежние значения.
10.7.1. Динамическая устойчивость асинхронного двигателя
Снижение напряжения на зажимах двигателя или рост механического момента на его валу вызывает появление избыточного тормозящего момента DМ (рис. 10.9). Как при снижении напряжения, так и при увеличении механического момента (последний превосходит максимальное значение электромагнитного момента Ммех > Mmax) скольжение двигателя будет увеличиваться и он опрокинется. Чтобы этого не произошло, надо своевременно восстановить напряжение или уменьшить механический момент. Если прежнее значение напряжения или момента будет восстановлено при скольжении S1 (рис. 10.9), то на вал двигателя будет действовать ускоряющий избыточный момент DМ1, который вернет двигатель в устойчивый режим работы со скольжением S0.
Если восстановление напряжения или момента произойдет при скольжении S3,, то избыточный момент DM2 будет иметь тормозной характер и двигатель опрокинется. Как же определить время, в течение которого будет достигнуто то или иное значение скольжения?

Рис. 10.9. К расчету динамической устойчивости асинхронного двигателя:
а — снижение напряжения; б — увеличение механического момента
Для этого необходимо решить уравнение движения ротора двигателя.
При возникновении избыточного момента на валу двигателя ускорение ротора прямо пропорционально избыточному моменту и обратно пропорционально моменту инерции и может быть записано в виде
I  (10.13)
(10.13)
где DМ= Мдв — Мс — разность электромагнитного момента двигателя и момента сопротивления приводимого механизма; J — момент инерции, причем J = Jдв + Jмех.пр, Jдв — момент инерции двигателя, Jмех. пр =Jмех (wном. мех/wном. дв) – приведенный момент механизма с учетом разных номинальных скоростей вращения; w — угловая скорость вращения двигателя, которая может быть выражена через скольжение следующим образом:
Подставляя уравнение (10.14) в (10.13) и выражая DМ в относительных номинальных единицах двигателя, получим
 (10,15)
(10,15)
где Тj = Jw2 1ном / Рном, а Рном — номинальная мощность двигателя.

Рис. 10.10. К решению уравнения движения ротора двигателя
Уравнение (10.15) описывает движение ротора двигателя при больших возмущениях и называется уравнением движения ротора асинхронного двигателя. Это уравнение нелинейно, его решение может быть получено с помощью любого из методов численного интегрирования. Наиболее просто это решение получается, если разбить ось абсцисс функции DM(S) на ряд равных интервалов DS (рис. 10.10). Тогда уравнение движения на любом интервале будет иметь вид

и время от момента нарушения режима до конца любого п-го интервала определится как

Точность решения зависит от величины DS и возрастает с ее уменьшением.
Получив, таким образом зависимость S(t), можно определить скольжение, соответствующее времени t1 на рис. 10.8. Зная это значение, можно судить о динамической устойчивости двигателя.
10.7.2. Динамическая устойчивость синхронного двигателя
Предположим, что двигатель снабжен АРВ пропорционального типа. Тогда он может быть, как и в предыдущих случаях (см. п. 9.11.2), представлен сопротивлением x‘d и ЭДС Е’. Характеристика мощности двигателя без учета второй гармоники имеет синусоидальный характер (кривая 1 на рис. 10.11). При уменьшении напряжения на зажимах двигателя рабочая точка перемещается на характеристику мощности, соответствующую новому режиму (точка b на характеристике 2, рис. 10.11, а). При этом на валу двигатель — приводимый механизм возникает тормозной, избыточный момент DМторм, угол d начинает увеличиваться, а тормозной момент уменьшается и становится равным нулю в точке с. Кинетическая энергия, запасенная ротором двигателя при его движении от точки b к точке с (величина ее пропорциональна площади abc), не позволит ротору остановиться в точке нового устойчивого равновесия с. Угол d будет увеличиваться до тех пор, пока площадь cde не станет равной площади abc. Точка d соответствует максимальному углу отклонения оси ротора от своего первоначального положения (d0).

Рис. 10.11. К анализу динамической устойчивости синхронного двигателя: а — снижение напряжения (характеристики момента UHOM (кривая /) и мощности при пониженных напряжениях (кривые 2, 3)); d — наброс механического момента
В точке d скорость вращения ротора становится равной синхронной, но, поскольку на вал двигателя действует избыточный ускоряющий момент DМуск, ротор начинает двигаться в сторону точки с. Около нее возникают затухающие колебания, аналогичные таковым при внезапном отключении линии (см. рис. 10.1, г).
Рассмотренное снижение напряжения (ему соответствует характеристика 2) не нарушает устойчивости двигателя, и он может нормально работать при пониженном напряжении (с меньшим запасом статической устойчивости). Если характеристика мощности располагается так, что максимальный угол отклонения ротора превышает критическое значение dкр3 (характеристика 3), на валу двигателя возникает тормозной, избыточный момент и его устойчивость нарушается. В этом случае для сохранения устойчивости необходимо восстановление напряжения Uо на зажимах двигателя в какой-либо момент времени, соответствующий углу dВОССТ.
При этом происходит переход рабочей точки на характеристику 1, новая площадь ускорения mgh будет достаточной для прекращения торможения двигателя и возвращения его в устойчивое рабочее состояние. Предельное значение угла dВОССТ, при котором восстановление прежнего значения напряжения обеспечит сохранение динамической устойчивости, определится из равенства площадей Fab’c‘ + Fnmf = Fc‘d‘n + Fmgh , или

откуда после преобразований, аналогичных приведенным в разд. 10.3, получаем

При набросе механического момента двигателя до значения P/0 (рис. 10.11, б) на валу возникает тормозной избыточный момент DМторм, вызывающий относительное движение ротора в сторону увеличения угла d. После того как угол ротора превысит значение d1 на валу двигателя появляется ускоряющий избыточный момент. Относительная скорость ротора, максимальная в точке с, становится равной нулю в точке d. Двигатель начинает движение в обратную сторону. В результате затухающих колебаний около точки с двигатель переходит в новый режим работы с углом d1.
При большем набросе механического момента (до величины p0«) динамическая устойчивость в отличие от предыдущего случая не сохранится. При любом значении угла d избыточный момент будет иметь тормозной характер и двигатель выпадет из синхронизма. В этом случае сохранение устойчивости возможно, если произойдет восстановление механического момента до его прежнего значения в какой-то точке f. На валу двигателя возникает ускоряющий избыточный момент, пропорциональный отрезку fg. Устойчивость двигателя сохранится, если площадь торможения amkf будет меньше или, по крайней мере, равна предельно возможной площади ускорения fgh. В случае равенства этих площадей угол восстановления механического момента является предельным. Его значение может быть найдено из равенства

Раскрыв интегралы и преобразовав полученное выражение, запишем

Время, в течение которого ротор двигателя достигнет угла dВосст. пр, определяется из зависимости d = f(t), которая в свою очередь получается в результате решения уравнения движения ротора. При возникновении на валу двигателя избыточного момента его относительная скорость Dw будет определяться формулой dd / dt = dw = w0 — w, где w — синхронная скорость.
Относительное значение Dw* найдем по формуле

Скольжение двигателя представим в виде

Ускорение ротора, соответствующее избыточному моменту DM, прямо пропорционально DM и обратно пропорционально постоянной инерции двигателя Тj.

 (10.16)
(10.16)

Это уравнение называется уравнением движения ротора синхронного двигателя. Правая часть этого уравнения нелинейна, поэтому решение может быть получено с помощью какого-либо численного метода (в частности, метода последовательных интервалов). Результатом решения является зависимость d=f(t) (рис. 10.12). Определив графическим методом предельный угол восстановления dвосст..пр, находим соответствующее ему предельное время t восст. пр так, как это показано на рис. 10.12.
Рис. 10.12. К определению t восст. пр
Решение уравнения движения ротора двигапозволяет судить об устойчивости двигателя. Если зависимость d(t) имеет нарастающий характер, то двигатель неустойчив. Если эта зависимость отражает затухающие колебания, то двигатель устойчив.
10.8. ПУСК ДВИГАТЕЛЕЙ
Пуск двигателя — это процесс перехода двигателя и рабочих механизмов из неподвижного состояния (w = 0) в состояние вращения с нормальной скоростью (w = w0).
Процессы, протекающие при пуске синхронных и асинхронных двигателей, а также их схемы пуска очень похожи и отличаются лишь тем, что у синхронного двигателя на последней стадии пуска включается возбуждение. Пуск двигателей является нормальным переходным режимом который рассматривается с точки зрения обеспечения нормальной работы системы электроснабжения. При этом решаются такие задачи, как определение тока двигателей, напряжения на их зажимах при пуске, возможность группового пуска двигателей и т. п.
Во время пуска двигатель потребляет значительно большее количество энергии, чем в нормальном режиме, что сопровождается увеличением пускового тока. Кратность пускового тока по отношению к номинальному достигает 5. 8 для двигателей с короткозамкнутым ротором.
Условия пуска двигателей определяются механическим моментом, который должен быть создан двигателем в начальный момент пуска.
Механические характеристики некоторых типов приводимых во вращение механизмов даны на рис. 10.13. Выделяют легкие, нормальные и тяжелые условия пуска.
Легкие условия возникают, когда начальный момент вращения двигателя Ммехнач = % Мном, где Мном — номинальный момент двигателя.

Рис. 10.13. Механические характеристики рабочих механизмов: 1 — подъемный кран; 2 — центробежные насосы; 3 — поршневые компрессы и вентиляторы
Нормальные условия возникают при Ммехнач = (50. 75) % Мном.
Тяжелые условия пуска — это такие условия, при которых
Ммех. нач = 100 % и более МНОМ.
 Тяжелые условия пуска характерны для таких механизмов, как подъемные краны (рис. 10.13), дробильные барабаны, насосы с открытой задвижкой и т. п. Для облегчения тяжелых условий пуска в некоторых приводах применяются специальные механизмы: центробежные, гидравлические, сцепные и другие муфты, с помощью которых двигатель нагружается лишь после того, как достигнет нужной скорости вращения и станет развивать соответствующий этой скорости механический момент.
Тяжелые условия пуска характерны для таких механизмов, как подъемные краны (рис. 10.13), дробильные барабаны, насосы с открытой задвижкой и т. п. Для облегчения тяжелых условий пуска в некоторых приводах применяются специальные механизмы: центробежные, гидравлические, сцепные и другие муфты, с помощью которых двигатель нагружается лишь после того, как достигнет нужной скорости вращения и станет развивать соответствующий этой скорости механический момент.
Схемы пуска определяются жесткостью питающей сети. Рассмотрим схемы прямого и реакторного пусков как наиболее распространенные в практике эксплуатации.
Рис. 10.14. Схемы пуска двигателей: а — прямого; б — реакторного
Прямой пуск производится по схеме, показанной на рис. 10.14, а. Двигатель включается на полное напряжение сети выключателем. Это наиболее простая схема, применяемая для пуска двигателей малой мощности.
Реакторный пуск производится по схеме, показанной на рис. 10.14, б. В начале пуска шунтирующий выключатель В2 отключен. Двигатель подключается к сети через реактор, который ограничивает пусковой ток двигателя, снижая напряжение на его зажимах. По мере разгона двигателя потребляемый им ток снижается, и при приближении скорости вращения двигателя к номинальной включается шунтирующий выключатель В2, выключающий пусковой реактор. Сопротивление реактора определяется следующим образом:
 (10.17)
(10.17)
где Iпуск, min — величина, до которой ограничивается пусковой ток с помощью реактора; Iпуск Mах — пусковой ток двигателя при номинальном напряжении на его зажимах.
Напряжение на зажимах двигателя при реакторном пуске определится из схемы замещения, показанной на рис. 10.15:

Пусковой ток при этом

 . (10.19)
. (10.19)
Момент при реакторном пуске определится, как

Рис. 10.15. Схема замещения при реакторном пуске
В выражениях (10.предполагается, что двигатель в режиме пуска может быть представлен только реактивным сопротивлением. Это не вносит в расчет существенной погрешности, так как активное сопротивление двигателя, обратно пропорциональное скольжению, в первый момент пуска (при S = 100 %) незначительно. Недостатком реакторного пуска является необходимость в дополнительном оборудовании (реакторе и выключателе). Кроме того, увеличивается время пуска двигателя, снижается его пусковой электромагнитный момент. Достоинство реакторного пуска улучшение режима напряжений в питающей сети, смягченные требования к ее оборудованию.
Пуск синхронных двигателей имеет свои особенности. Синхронный двигатель подключается к сети невозбужденным. Его обмотка возбуждения короткозамкнута или закорачивается на сопротивление rпуск = (5rf, где rf, — сопротивление обмотки возбуждения. Пусковой ток двигателя определится как

где Uм — напряжение на зажимах двигателя; x«d — сверхпереходное сопротивление двигателя. Как только скорость вращения ротора станет близкой к синхронной, ему подается возбуждение и он втягивается в синхронизм.
Расчет режима пуска производится с целью определения времени пуска, допустимости нагрева обмоток, характера изменения напряжений в питающей сети. Как для асинхронных, так и для синхронных двигателей расчет режима пуска производится решением уравнений движения ротора двигателя. Начальное значение скольжения при этом равно единице (Sпуск =100 %). Разбивая интервал времени пуска на малые интервалы, находят зависимость
S(t), по которой определяют время пуска (при S = So). Зная время существования токовых перегрузок и их величины, вычисляют нагрев двигателя. Зависимость U(t) (необходимая, например, для оценки устойчивости работающих рядом двигателей) определится, если на каждом интервале времени рассчитывать режим напряжения в питающей сети и на зажимах двигателя.
Пример 10.2. От шин 6 кВ понижающей подстанции питаются два одинаковых асинхронных двигателя Ml и М2, каждый из которых имеет параметры:
Рном = 2000 кВт, UHOM = 6 кВ, cosj = 0.83, h = 92 %, Iпуск = 5.2.
Остальные элементы схемы характеризуются следующими данными: Трансформатор Т-1: SHOM = 15 MBA, 115.5/37 кВ, UK = 10.5 %.
Трансформатор Т-2: SHOM = 7.5 MBA, 36.8/6.6 кВ, UK = 7.5 %.
Линия L: l= 15 км, x0 = 0.4 Ом/км.
Система S — источник бесконечной мощности с неизменным напряжением 107кВ.
Требуется сравнить условия пуска двигателей для случаев, когда:
а) оба двигателя пускаются одновременно;
б) пускается один двигатель, в то время как другой работает при номиналь
ном напряжении с нагрузкой 0.67Sном при cos j = 0.8.
Сравнение провести по значениям периодических слагающих пускового тока и пускового момента, имея в виду, что пусковой момент при номинальном напряжении составляет 70 % номинального момента двигателя.

Решение. Примем Sб = 7.5 МВА и Uб1 = 6 кВ. Тогда базисные напряжения на других ступенях определим как


Относительные реактивности элементов схемы замещения, приведенной на рис. 2.21, б, при этом вычислим так:




где номинальная мощность двигателя

Напряжение системы в относительных единицах 
Случай а. В схеме замещения следует считать Е1 = Е2 = 0.
Результирующая реактивность схемы составляет

Пусковой ток в каждом двигателе при базисных условиях

или по отношению к номинальному току двигателя

Остаточное напряжение на выводах двигателя при его пуске U = 1.1*0.55 = 0.605, соответственно момент двигателя при пуске Mпуск = 0.6052 * 0.7MНОМ = 0.256MНОМ.
Случай в. Найдем вначале ЭДС двигателя, который работал под нагрузкой. Его рабочий ток при базисных условиях составляет

Следовательно, искомая ЭДС будет равна

Суммарная реактивность со стороны системы до шин 6 кВ
Эквивалентная реактивность схемы до двигателя М2, пуск которого рассматривается в данном случае (соответственно Е2 = 0), составляет xSM = 0.195//0.55 =0.144. Эквивалентная ЭДС, приложенная за этой реактивностью, вычисляется, так:

Таким образом, пусковой ток двигателя при базисных условиях

при номинальных условиях

Остаточное напряжение UOCT =1.44*0.55 = 0.79 и развиваемый двигателем момент при пуске Мпуск = 0.792 * 0.7МН = 0.44МН.
Как видно, по сравнению с условиями, рассмотренными для случая «а», здесь пусковой ток больше в 0.44 / 0.256 = 1.72 раза.
10.9. САМОЗАПУСК ДВИГАТЕЛЕЙ
Самозапуск — это процесс восстановления нормального режима работы двигателей после кратковременного отключения источника питания. Задача самозапуска заключается в том, чтобы не допустить массового отключения электродвигателей. Самозапуск отличается от пуска тем, что:
— одновременно пускается целая группа двигателей;
— в момент восстановления питания какая-то часть или все двигатели вращаются с некоторой скоростью;
— самозапуск происходит под нагрузкой.
По условиям самозапуска механизмы делятся на две группы:
1) механизмы, имеющие постоянный момент сопротивления и при кратковременном прекращении питания быстро теряющиескорость (шаровые мельницы, транспортеры, прокатные станы, подъемные краны и т. п.);
2) механизмы, имеющие вентиляторные характеристики момента (центробежные насосы, вентиляторы, дымососы, центрифуги и др.). Самозапуск этой группы проходит легче, чем механизмов первой группы, так как момент сопротивления механизмов снижается при уменьшении скорости.
Для обеспечения успешного самозапуска определяют суммарную мощность электродвигателей, которые могут быть запущены после перерыва питания. В соответствии с полученным значением выделяются те двигатели, отключение которых недопустимо по условиям технологического процесса или правилам техники безопасности. Суммарная не отключаемая мощность электродвигателей определяется при условии, что остаточное напряжение в режиме самозапуска обеспечивает вращающий момент, превышающий момент механизма.
Расчет самозапуска предполагает решение нескольких задач:
1. Рассчитывается момент вращения двигателей при пониженном напряжении и проверяется его превышение над моментами механизмов.
2. Устанавливается температура дополнительного нагрева двигателей из-за увеличения времени разгона.
Скольжение двигателей к моменту самозапуска может быть определено численным интегрированием уравнения движения ротора двигателя. Рассматривая самозапуск асинхронных двигателей, предположим, что питание двигателей осуществляется по наиболее характерной схеме, показанной на рис. 10.16, а.
Напряжение на зажимах двигателей при самозапуске
 (10.21)
(10.21)

где, причем ZM — сопротивление эквивалентного
двигателя, замедляющего все п подключенных двигателей; хвн = xc + xt + xL — внешнее сопротивление.
Сопротивление двигателя в момент самозапуска:


Рис. 10.16. Схема питания нагрузки: а — принципиальная схема; б — схема замещения
где SC3 — суммарная мощность двигателей, самозапуск которых будет успешным; UHOM — номинальное напряжение двигателей. Подставляя (10.22) в (10.21), найдем мощность SC3:
 (10.23)
(10.23)
Мощность самозапуска связана с номинальной мощностью следующим образом (при КПД двигателей, равном 1):
 (10.24)
(10.24)

где К — кратность пускового тока. Подставляя (10.24) в (10.23), получаем выражение для мощности, которую можно назвать не отключаемой мощностью двигателей при самозапуске:

Минимальное допустимое напряжение на зажимах двигателей по условию осуществимости самозапуска для механизмов с постоянным моментом сопротивления определяется как

Для механизмов с характеристиками вентиляторного типа

где МMmin — минимальный момент вращения двигателя, который часто принимают равным пусковому; Мм mах — максимальный момент вращения двигателя.
Самозапуск синхронных двигателей обладает рядом особенностей по сравнению с асинхронными. Если после кратковременного перерыва питания двигатель не выпал из синхронизма или не был отключен, то происходит самозапуск. Если двигатель выпадает из синхронизма и к моменту восстановления напряжения работает как асинхронный с определенным скольжением, то процесс его самозапуска нужно рассматривать как пуск асинхронного двигателя, но осуществляемый от достигнутого скольжения. При этом возбужденный двигатель включается на шины нагрузки без дополнительных сопротивлений в цепи статора.
Задачами расчета самозапуска являются:
1) проверка влияния самозапуска на режим работы потребителей, находящихся в электрической близости;
2) расчет остаточного напряжения на зажимах двигателей;
3) расчет момента двигателя;
4) определение времени пуска и перегрева двигателя.
Во время перерыва питания напряжение на зажимах двигателя определяется его ЭДС, которая уменьшается по мере выбега. При уменьшении скорости ротора на 20 % напряжение двигателя с форсировкой не превышает номинального, а без форсировки снижается до 60. 70 % номинального.
Допустимое напряжение на шинах нагрузки во время самозапуска определяется следующими требованиями:
1. При совместном питании двигателей и освещения:
— при частых и длительных пусках (U> 0.9);
— при редких и кратковременных пусках и самозапусках
(U> 0.8. 0.85).
2. При раздельном питании двигателей и освещения
(U>0.7. 0.8).
3. При люминесцентном освещении (U> 0.9).
4. При питании двигателей через блок-трансформаторы напряжение ограничивается минимальной величиной электромагнитногомомента.
В тех случаях, когда самозапуск неосуществим, можно применять автоматическую ресинхронизацию двигателя. Вхождение в синхронизм обеспечивается действием форсировки возбуждения, повышающей максимум синхронного момента.
10.10. АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ВКЛЮЧЕНИЕ
И АВТОМАТИЧЕСКОЕ ВКЛЮЧЕНИЕ РЕЗЕРВНОГО ПИТАНИЯ
Короткие замыкания, возникающие в различных точках электрической системы, могут быть преходящими, т. е. исчезать через какой-то небольшой промежуток времени. В этом случае эффективно применение автоматического повторного включения (АПВ) того элемента, который отключился защитой из-за КЗ. АПВ называют трехфазным, если отключаются и вновь включаются все три фазы поврежденного элемента, или однофазным (пофазным) (ОАПВ), если отключаются только одна или две поврежденные фазы. АПВ считается успешным, если за время отключения короткое замыкание исчезает и после повторного включения может восстановиться нормальная работа, и неуспешным, если повторное включение производится на сохранившееся КЗ. Существуют системы АПВ однократного, двухкратного и многократного действия, обеспечивающие соответственно одно, два или несколько повторных включений.
Интервал времени между моментом отключения КЗ и повторным включением называется паузой АПВ. В течение паузы происходит деионизация среды в месте КЗ и выключатель возвращается в исходное состояние. В системах электроснабжения (сети до 35 кВ) пауза АПВ принимается в пределах 0.3. 0.5 с. При определении этих значений учитывалось, что время деионизации в сетях 6. 10 кВ, например, составляет 0.07. 0.09 с, а собственное время включения выключателя имеет порядок 0.25. 0.3 с.
АПВ на воздушных линиях позволяет восстановить электроснабжение в 60. 90 % всех аварийных отключений. При установке систем АПВ на трансформаторах важно предусмотреть блокировку, запрещающую работу АПВ, если отключение произошло от действия защиты, реагирующей на внутренние неисправности трансформатора (например, газовой). Для ответственных двигате-лей после их аварийного отключения предусматривается АПВ, обеспечивающее их самозапуск.
 Автоматическое включение резервного питания (АВР) является эффективным способом повышения надежности электроснабжения. Устройства АВР вначале разрабатывались для собственных нужд электростанций, но затем их стали широко применять в системах электроснабжения. Схема питания нагрузки с использованием АВР показана на рис. 10.17. В нормальном режиме левая и правая нагрузки и эквивалентные двигатели питаются раздельно. В случае повреждения и отключения какого-либо элемента схемы (линии или трансформатора) АВР производится с помощью выключателя В7, который в нормальном состоянии отключен. Действие системы АВР осуществляется при исчезновении напряжения на резервируемом элементе. Время действия зависит от схемы электроснабжения, условий самозапуска электродвигателей и времени L срабатывания релейной защиты на отходящих линиях. Устройства
Автоматическое включение резервного питания (АВР) является эффективным способом повышения надежности электроснабжения. Устройства АВР вначале разрабатывались для собственных нужд электростанций, но затем их стали широко применять в системах электроснабжения. Схема питания нагрузки с использованием АВР показана на рис. 10.17. В нормальном режиме левая и правая нагрузки и эквивалентные двигатели питаются раздельно. В случае повреждения и отключения какого-либо элемента схемы (линии или трансформатора) АВР производится с помощью выключателя В7, который в нормальном состоянии отключен. Действие системы АВР осуществляется при исчезновении напряжения на резервируемом элементе. Время действия зависит от схемы электроснабжения, условий самозапуска электродвигателей и времени L срабатывания релейной защиты на отходящих линиях. Устройства
АВР не должны действовать при КЗ на отходящих линиях резерви-руемого участка. Это обеспечивается дополнительной выдержкой
времени или блокировкой.
Рис. 10.17. Схема питания с устройством АВР
10.11. МЕТОДИЧЕСКИЕ И НОРМАТИВНЫЕ УКАЗАНИЯ
К РАСЧЕТУ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ
Целью расчетов динамической устойчивости является определение характера динамического перехода системы от одного режима к другому. Если при этом ни одна станция не выпадает из синхронизма, то такой переход считается устойчивым.
Для определения динамической устойчивости принимаются расчетные возмущения, разделяемые на три группы.
Группа 1. Отключение элемента сети напряжением 500 кВ и ниже. Однофазное короткое замыкание при работе основной защиты с успешным и неуспешным ОАПВ.
Группа 2. Отключение любого элемента сети напряжением выше 500 кВ (для схемы связи атомной электростанции (АЭС) с энергосистемой выше 750 кВ). Однофазное КЗ на линии электропередачи выше 500 кВ при работе основной защиты с неуспешным ОАПВ. Многофазные, короткие замыкания на линии электропередачи любого класса напряжения при работе основной защиты с успешным и неуспешным АПВ. Отключение генератора или блока генераторов, наибольших по мощности в данной ЭС.
Группа 3. Одновременное отключение двух цепей или двух линий, идущих по одной трассе более чем на половине длины более короткой линии. Возмущения групп 1 и 2 с отключением элемента сети или генератора (блока генераторов), которые из-за ремонта одного из выключателей приводят к отключению второго элемента сети, подключенного к этому же распределительному устройству. Однофазное КЗ на линии электропередачи или шинах любого класса напряжения при отказе одного из выключателей. Отключение части генераторов электростанции, связанное с полным отключением одной секции (системы) шин суммарной мощностью до 50 % мощности электростанции или возникновение такого же или большего аварийного небаланса мощности по любым причинам.
Переток в сечении
Группы возмущений, при которых должна обеспечиваться динамическая устойчивость
Видео:Вебинар "Анализ Динамической Устойчивости энергосистем"Скачать

Динамическая устойчивость в электроэнергетической системе
Видео:Электромеханические переходные процессы. Динамическая устойчивость. Метод площадей.Скачать

Динамическая устойчивость в электроэнергетической системе
В любой момент времени в электроэнергетической системе может возникнуть резкое нарушение квазиустановившегося режима работы, из-за короткого замыкания, включения или отключения линий электропередачи, генерирующего оборудования или электроустановок потребителя и т.п. Следствием возникшего возмущения является отклонение скоростей вращения роторов генераторов от синхронной, в результате в энергосистеме возникают качания роторов генераторов станций, что ведет к возникновению качаний перетоков активной и реактивной мощности, а также напряжений и токов. Если возникающие колебания затухают, то считается, что динамическая устойчивость сохраняется, в противном случае – динамическая устойчивость нарушается.
Под понятием динамической устойчивости понимают способность энергосистемы переходить от исходного устойчивого режима к другому, также устойчивому режиму либо вернуться к установившемуся режиму, близкому к исходному, после больших изменений ее параметров.
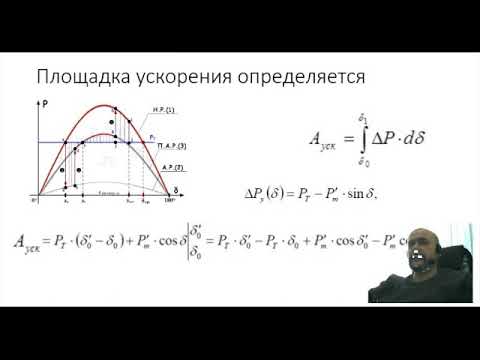
Основным методом исследования динамической устойчивости электрических систем на современном этапе является численное интегрирование дифференциальных уравнений, описывающих поведение системы. Но существует более простой и наглядный метод, основанный на энергетическом подходе к анализу динамической устойчивости, который называется методом площадей. В данном методе кинетическая энергия системы определяется по площади графика переходного процесса. Задача исследования заключается в сравнении площадей ускорения и торможения, то есть сравнения кинетической энергии, полученной в процессе ускорения ротора генератора с той энергией, которая расходуется в процессе торможения ротора.
В качестве примера рассмотрим короткое замыкание с отключением параллельной линии электропередачи в простейшей схеме сети, которая состоит из генератора, работающего через силовой трансформатор и двухцепную линию электропередачи на шины бесконечной мощности (см. рис.1).

Рис.1. Расчетная схема сети
Если сделать допущение о том, что на генераторе установлено АРВ СД, которое контролирует напряжение на стороне генераторного напряжения, а также пренебречь активными сопротивлениями в расчетной схеме сети, то электромагнитная мощность, которая передается от генератора, определяется следующим выражением:

В записанном выражении переменная  представляет собой модуль линейного напряжения на шинах станции, приведенный к стороне ВН, а переменная
представляет собой модуль линейного напряжения на шинах станции, приведенный к стороне ВН, а переменная  — модуль линейного напряжения в точке шин бесконечной мощности.
— модуль линейного напряжения в точке шин бесконечной мощности.

Рис.2. Векторная диаграмма напряжений
Взаимный угол между вектором напряжения и вектором напряжения обозначается через переменную —  , для которого в качестве положительного направления принимается направление против часовой стрелки от вектора напряжения
, для которого в качестве положительного направления принимается направление против часовой стрелки от вектора напряжения  .
.
В доаварийном режиме работы генератор работает в режиме, который соответствует точке «а», расположенной на угловой характеристике для нормального режима работы (Н.Р.). В рассматриваемом примере мощность турбины принимается неизменной за всё время переходного процесса  , так как регулятор скорости не успевает за это время изменить мощность, развиваемую турбин.
, так как регулятор скорости не успевает за это время изменить мощность, развиваемую турбин.
В некоторый момент времени возникает короткое замыкание, которое вызывает снижение напряжение в сети. Короткое замыкание в расчетной сети, моделируется шунтом короткого замыкания на землю. В зависимости от вида короткого замыкания (однофазное, двухфазное, двухфазное с землей или трехфазное) величина шунта меняется.

Рис.3. Угловая характеристика в нормальном (I), аварийном (II) и послеаварийном (III) режимах
В результате короткого замыкания отдаваемая мощность в сеть уменьшается: происходит переход электромагнитной мощности из точки «а» характеристики нормального режима в точку «b» характеристики аварийного режима (А.Р.). Такое скачкообразное изменение активной мощности между двумя характеристиками происходит из-за того, что угол δ мгновенно измениться не может вследствие инерции ротора. В результате на валу системы турбина-генератор возникает избыточный ускоряющий момент, обусловленный разностью моментов (мощностей) турбины и электромагнитной мощности генератора. Под влиянием ускоряющего момента ротор генератора начнет ускоряться относительно энергосистемы (вектор напряжения будет перемещаться относительно вектора напряжения ). В результате взаимный угол будет увеличиваться и величина электромагнитной мощности перейдет из точки «b» в точку «c».
В точке «с» происходит отключение поврежденной линии электропередачи действием устройств РЗА. После отключения КЗ электромагнитная мощность переходит на характеристику послеаварийного режима (П.А.Р.): происходит переход электромагнитной мощности из точки «c» характеристики аварийного режима (А.Р.) в точку «d» характеристики послеаварийного режима (П.А.Р.). В рассматриваемом примере в точке «d» электромагнитная мощность меньше мощности турбины, поэтому на ротор будет продолжать действовать ускоряющий момент (частота вращения ротора будет расти).
В точке «e» выдаваемая мощность в сеть становится равной мощности турбины, однако в связи с тем, что ротор приобрел некоторую избыточную кинетическую энергию, он продолжит увеличивать скорость вращения. В случае, когда выдаваемая мощность генератора в сеть становится больше мощности турбины, на валу системы турбина-генератор возникает избыточный тормозящий момент, который снижает скорость вращения ротора. В некоторой точке «i» генератор израсходует запасенную кинетическую энергию и ротор начнет перемещаться в обратном направлении. После нескольких колебаний с постепенно затухающей амплитудой относительное движение ротора прекратится и генератор перейдёт в новый установившийся режим работы. Если же ротор пройдёт за точку, соответствующую углу  , то избыточный момент вновь станет ускоряющим и генератор выйдет из синхронизма.
, то избыточный момент вновь станет ускоряющим и генератор выйдет из синхронизма.
Работа сил на пути ускорения выражается интегралом:

Заштрихованная площадь криволинейной фигуры «abcde», называется площадью ускорения, и соответствует (эквивалентна) энергии, запасаемой ротором в процессе ускорения.
Работа сил на пути торможения выражается интегралом, аналогично:

Заштрихованная площадь криволинейной фигуры «efghij», называется площадью торможения, и соответствует (эквивалентна) энергии, теряемой ротором в процессе торможения.
Таким образом, система будет сохранять устойчивость тогда, когда возможная площадь торможения  будет больше площади ускорения
будет больше площади ускорения  . Если площадка ускорения будет превышать площадь торможения, то генератор выпадет из синхронизма с приемной системой. Приведенный метод оценки динамической устойчивости электроэнергетической системы получил название метода площадей.
. Если площадка ускорения будет превышать площадь торможения, то генератор выпадет из синхронизма с приемной системой. Приведенный метод оценки динамической устойчивости электроэнергетической системы получил название метода площадей.
Мероприятия по повышению динамической устойчивости
1.Снижения длительности короткого замыкания, которая обеспечивается с помощью применения современных устройств РЗА и выключателей. Время отключения короткого замыкания (работа устройств РЗА и время отключения выключателя) может достигать 40-50 мсек.
2.Форсировка возбуждения на генераторах, также способствует повышению устойчивости. Форсировка возбуждения вводится в работу при глубоком снижении напряжения генератора вследствие короткого замыкания. Форсировка повышает ЭДС генераторов и напряжение на шинах электростанции, что приводит к уменьшению сброса электрической мощности.

Рис.4. Изменение напряжения возбуждения при форсировке возбуждения
Важными технические характеристики системы возбуждения генераторов являются: быстродействие, определяемое скоростью нарастания напряжения на обмотке ротора при форсировке, и кратность форсировки, которая определяется отношением потолочного напряжения к номинальному напряжению возбуждения.
3.Эффективным средством повышения устойчивости являются все виды автоматического повторного включения (АПВ). Успешное АПВ увеличивает площадку торможения. Отключение части генерирующего оборудования в передающей части энергосистемы. Данное мероприятие приводит к снижению мощности турбины от исходной мощности, что приводит к увеличению максимальной площадки торможения. Одновременно происходит увеличение критического угла δ. Чтобы исключить нежелательное снижение частоты в энергосистеме, ограничение мощности генераторов в передающей части энергосистемы выполняется совместно с отключением части потребителей в приемной ее части.
4.Применение кратковременной импульсной разгрузки тепловых турбин (ИРТ) через систему регулирования является эффективным средством повышения устойчивости.Импульсная разгрузка турбины применяется с целью компенсации избыточной кинетической энергии, приобретенной за время короткого замыкания и бестоковой паузы БАПВ (ОАПВ).

Рис.5. Импульсная разгрузка турбины через электрогидравлический преобразователь
Для выполнения импульсной разгрузки тепловые турбины оборудуются специальными электрогидравлическими преобразователями (ЭГП), которые преобразуют электрические сигналы в гидравлические воздействия на систему регулирования частоты вращения. Электрогидравлический преобразователь обеспечивает быстрый ввод в систему регулирования сигнала разгрузки. После снятия сигнала разгрузки система регулирования восстанавливает мощность турбины до первичного значения. Глубина и скорость разгрузки зависят от параметров регулирующего импульса: амплитуды и длительности. Характеристики 1 и 2 соответствуют импульсам различной амплитуды и длительности. Снижение мощности турбины начинается с запаздывания 0,15 – 0,2 сек., обусловленным инерционностью элементов гидравлической системы регулирования. Минимальное значение мощности достигается через 0,5 – 0,7 сек. после подачи импульса регулирования.
Для снижения мощности турбины в послеаварийном режиме воздействие через ЭГП дополняется воздействием на ограничение мощности турбины (ДРТ) через механизм управления турбиной (МУТ). Характеристика 3 соответствует разгрузки турбины через ЭГП и МУТ, которая позволяет снизить мощность турбины в послеаварийном режиме до величины  . Данное действие применяется для устранения перегрузки оборудования в послеаварийном режиме в передающей части энергосистемы.
. Данное действие применяется для устранения перегрузки оборудования в послеаварийном режиме в передающей части энергосистемы.
Видео:16-3 Динамический переход при отключении линии. Метод площадейСкачать

Упрощенные методы определения динамической устойчивости
Сильные возмущения в СЭС приводят к резким изменениям режима ее работы. Они возникают в результате изменения состава элементов электрической сети при их включениях и отключениях, КЗ, нарушений баланса генерируемой и потребляемой мощностей в узловых точках СЭС. Наиболее опасны возмущения при КЗ.
Задачами анализа динамической устойчивости СЭС являются оценка характера переходного процесса при сильных возмущениях, установление критических параметров при изменении режима, а также расчет значений существенных параметров режима при переходе из одного состояния в другое. Для решения этих задач используются приближенные методы, поскольку точная оценка динамической устойчивости при учете всех переходных процессов и изменений в СЭС, связанных с сильными возмущениями, весьма сложна.
Приближенные методы анализа динамической устойчивости СЭС основываются на ряде допущений:
разделении электромагнитных и электромеханических переходных процессов по скорости их протекания с мгновенным изменением электрической мощности при смене режимов;
малости отклонений частоты вращения роторов генераторов от синхронной;
неизменности вращающего момента первичных двигателей генераторов и постоянных инерции в течение переходного процесса;
замене совокупности генераторов одним эквивалентным;
рассмотрении переходных процессов на ограниченном интервале времени;
сохранении симметрии трехфазной системы источников при ее нарушении в электрической сети;
учете только основных нелинейных характеристик элементов и др.
Приближенные методы анализа можно разделить на упрощенные и уточненные, отличающиеся уровнем принимаемых допущений и назначением решаемой задачи.
Упрощенные методы позволяют просто и быстро предварительно оценить динамическую устойчивость простейших электрических систем, однако они приемлемы лишь для грубой оценки.
Уточненные методы направлены на конкретизацию расчетов при учете ряда факторов (не принимаемых во внимание в упрощенных методах, но оказывающих существенное влияние на переходный процесс):
автоматического регулирования возбуждения, изменяющего э.д.с. генераторов и, следовательно, их электромагнитный момент;
автоматического регулирования частоты вращения первичных двигателей и их вращающего момента;
учета дополнительных тормозных моментов, возникающих в процессе КЗ от периодической составляющей тока статора и токов, наводимых в успокоительных обмотках ротора;
учета динамических характеристик узлов нагрузки.
Основными упрощенными методами анализа динамической устойчивости СЭС являются:
метод площадей, используемый для определения предельных значений угла и времени отключения КЗ;
метод последовательных интервалов, применяемый для качественной оценки характера переходного процесса по изменению угла S во времени.
Предельный угол отключения КЗ можно найти, не устанавливая характер переходного процесса смены режимов. Для этого используется метод площадей, позволяющий оценить соотношение изменения энергии в различных фазах процесса смены режимов работы СЭС.
В качестве примера энергетически оценим переход из нормального в аварийный и послеаварийный режимы простейшей системы, которая содержит генератор, работающий через трансформатор и двухцепную ЛЭП на шины бесконечной мощности рис.27.

Смена состояний рассматриваемой системы представлена на рис. 28 через угловые характеристики активной мощности.
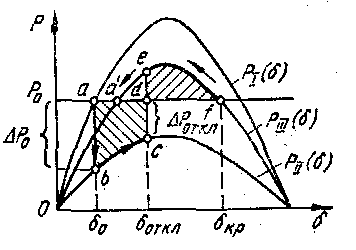
Рис. 28. Угловые характеристики мощности для нормального, аварийного и послеаварийного режимов работы системы
Рабочая точка в нормальном режиме соответствует координатам (P0,δ0) отражающим равенство мощности, развиваемой первичным двигателем генератора, и мощности P0= Pт(δ0), передаваемой генератором в сеть со сдвигом на угол δ0 между э. д. с. E’и напряжением U.
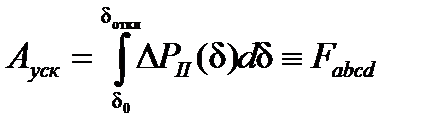
При появлении КЗ происходит сброс передаваемой генератором мощности с PI(δ0) до PII(δ0), вследствие чего появляется избыточная мощность ΔPII(δ)=P0–PII(δ), которая вызывает ускорение ротора генератора. При этом рабочая точка режима перемещается по угловой характеристике мощности PII(δ) в направлении увеличения угла δ δ>δ0.
Если отключению поврежденной цепи соответствует угол δоткл то ротор генератора во время ускорения запасет кинетическую энергию
 (62)
(62)
которая соответствует заштрихованной на рис.28 площади Fabcd, называемой площадью ускорения.
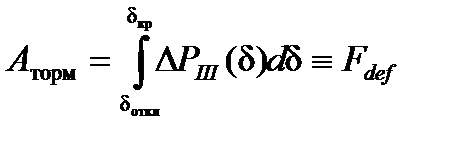
Во время торможения может быть израсходована энергия, предельное значение которой для интервала изменения угла δ, равного δоткл – δкр, определяется выражением
 (63)
(63)
Заштрихованная на рис.28 площадь Fdef, называемая площадью торможения, соответствует кинетической энергии (63), которая может быть израсходована ротором генератора во время торможения.
Предельное время отключения КЗ tоткл.пред соответствует предельному углу отключения. Для произвольного момента времени связь этих величин отражается уравнением движения (64)
 (64)
(64)
Аналитическое решение его возможно только для частного случая, а именно полного разрыва связи генератора с шинами приемной системы, когда P=PII(δ)=0, что происходит при трехфазном КЗ на одной из цепей ЛЭП. При этом уравнение (64) упрощается и принимает вид
 (65)
(65)
Решение этого уравнения методом последовательного интегрирования при постоянных c1=(dδ/dt)t=0=0 и c2=δ0 позволяет получить угол
 (66)
(66)
откуда можно найти значение предельного времени отключения трехфазного КЗ:
 (67)
(67)
Если угол δ выразить в градусах, а постоянную времени Tj-в секундах, то формула (67) примет вид
 (68)
(68)
При малой длительности КЗ (0,1-0,2 с) формулой (68) пользуются для вычисления предельного времени отключения несимметричных КЗ, когда PII(δ)>0 (см. рис. 28). В этом случае мощность P0 представляют в виде
 (69)
(69)
Переходный процесс, описываемый уравнением (64), разбивают на ряд равных интервалов времени Δt. В практических расчетах интервал времени берут в пределах 0,02-0,1 с в зависимости от длительности КЗ и характеристик устройств системной автоматики. Переходный процесс рассматривают последовательно по интервалам. В каждом интервале времени избыток мощности (правая часть уравнения) считают неизменным и при этом допущении вычисляют приращение угла Δδ.
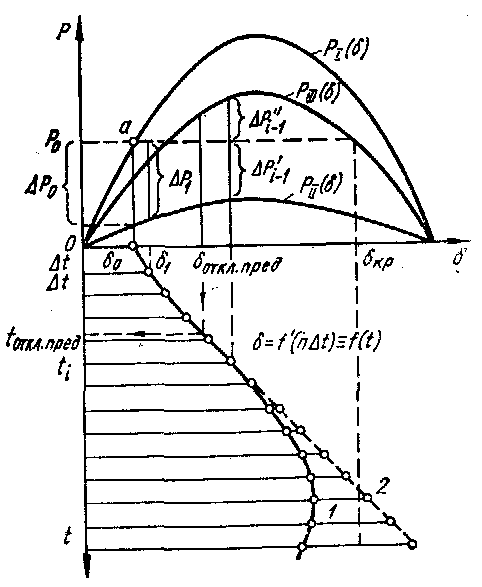
Рис.29. К расчету динамической устойчивости системы методом последовательных интервалов.
Расчет точек кривой δ=f(nΔt) следует выполнять до тех пор, пока угол δ не начнет уменьшаться по кривой 1 (см. рис. 29), что соответствует сохранению устойчивости, или пока не будет установлено, что угол δ продолжает возрастать по кривой 2, соответствующей нарушению устойчивости. По кривой δ=f(t) можно определить также предельное время отключения КЗ.
📽️ Видео
Электромеханические переходные процессы.Статическая устойчивость. Угловая характеристика.Скачать

Анализ динамической устойчивости механизмов собственных нужд ТЭЦСкачать

16-2 Динамическая устойчивость простейшей электропередачиСкачать

Вебинар: Анализ Динамической Устойчивости энергосистемСкачать

13-1 Устойчивость энергосистем. Введение. Виды устойчивостиСкачать

Переходные процессы | Классический метод расчета переходных процессов. Теория и задачаСкачать

ЭлМехПП Переподготовка 4 Динамическая устойчивостьСкачать

18-3 Меры повышения динамической устойчивости: АРВ и форсировка возбужденияСкачать

Электромеханические переходные процессы. Устойчивость. Уравнение движение ротора.Скачать
Как работает метод наименьших квадратов? Душкин объяснитСкачать

Электромеханические переходные процессы. Устойчивость электрических систем. Метод малых колебаний.Скачать

Анализ устойчивости по напряжениюСкачать

ВИЭ. Динамическая устойчивость станции. LVRTСкачать

14-1 Практический критерий статической устойчивости простейшей электропередачиСкачать

Устойчивость. Лекция 3. Альтернативные методы расчета на устойчивость. Метод прямого анализа.Скачать

Реактивная мощность за 5 минут простыми словами. Четкий #энерголикбезСкачать
